基于蜂窝车联网技术支持的智能车辆编队行驶场景,研究智能车辆面临的信息安全威胁,并提出安全防护建议。通过分析车辆编队在直连通信接口中的车队内部及与路侧单元间的通信,以及车队编组、管理的通信过程,识别智能车辆编队行驶面临的信息泄露、信息篡改、身份仿冒等安全威胁,并针对性地提出车辆编队行驶安全防护方案,如通信内容加密,引入区块链技术实现成员身份鉴别和数据安全等。
车辆是人类社会生产、生活的重要工具,在给人们生活带来巨大便利的同时也引发了交通安全、路怒症等问题。世界卫生组织发布的《2018 年全球道路安全现状报告》显示,全世界每年大约有 135 万人会在交通事故中失去生命,而 94% 的交通事故是人为原因造成的 。自动驾驶技术通过车辆间通信技术、协商通行权限等方式,减少甚至解放司机的工作,有效降低了人为因素导致的交通事故,大幅提高了交通安全性,同时也提高了道路的通行效率。随着通信技术、人工智能技术、车载传感器技术的进步,车辆自动驾驶的实现已经具备技术基础,逐步成为学术界、工业界研究的热点,日渐成熟。2021 年,美国交通部研究表明,现在已大规模商用的、采用低等级(L2)辅助驾驶技术的车辆,可将事故发生率降低 60% 左右 ,而采用更高等级自动驾驶技术将有望进一步大幅提高交通安全性。此外,在运输领域,自动驾驶可以提高交通效率,降低社会整体的物流成本,还可以替代人工驾驶员,降低运输成本,提高生产效率。
对运输企业而言,自动驾驶最大的好处就是减少车辆行驶中的燃油消耗及降低人工成本。
随着技术的发展,蜂窝车联网(Cellular Vehicle to Everything,C-V2X)已经成为自动驾驶的核心技术,旨在车、网互联,以及把车与车、车与人、车与道路等基础设施连成网,以实现车与外界信息的交换。C-V2X 主要包括车与行人(Vehicle to Pedestrian,V2P)、车与车(Vehicle to Vehicle,V2V)、车与路(Vehicle to Infrastructure,V2I)、车与网络(Vehicle to Network,V2N)的全方位网络连接。
C-V2X 消 息 可 以 通 过 通 用 用 户 网 络 接 口(Universal User to Network interface,Uu) 在 基站和用户设备(User Equipment,UE)之间传输,也可通过直连通信(Proximity Communication,PC5)接口在 UE 之间直接传输,即设备与设备之间直接通信。
第三代合作伙伴计划(3rd Generation Partnership Project,3GPP)发布的移动通信标准 R16 版本中,对基于 5G 新空口(New Radio,NR)的车联网车用无线通信技术(Vehicle to Everything,V2X)进行规范,以通过 5G NR 更低的时延、更高的可靠性、更高的容量来提供更高级的 V2X 服务。
智能车队编组行驶
现有的自动驾驶解决方案大部分聚焦在基于单车智能的感知和决策上,其主要限制因素包括感知能力的局限、摄像头视频和图像认知能力的局限,以及单车处理非结构化数据(原始多源异构感知数据)时计算和通信能力受限等。而 C-V2X 技术可以实现智能网联辅助的自动驾驶,通过在车与车、车与路间快速建立可靠的通信连接,使得车辆有关的结构化数据在车辆之间进行有效交互,从而降低了车辆自身的环境感知和数据处理的要求,同时通过全局决策可以有效地提高交通效率、降低事故发生率。公路的车辆编队场景,尤其是公路货运车队。
车辆编队,即多辆车以一定的车间间距形成稳定的队列。通过减小车辆间距,车辆编队技术可以提高道路容量,同时使每辆车受益于其前车行驶而减少空气阻力,进而降低燃油消耗。付思雨等人指出,当两辆相同标准的载货 车 以 80 km/h 的 速 度 和 25 m 的 间 距 在 高 速公路上行驶时,后方跟随车辆所受空气阻力将下降 30%,整体的燃油经济性将提升 7%。而3GPP 的研究指出,车辆编队行驶时,若队列内车辆在 100 km/h 的速度下维持 8~25 m 的间距,可以节省 7%~15% 的燃油消耗。但是,更高的速度和更小的间距意味着更大的碰撞风险,因此迅速、有效地调整车队内每一辆车的行驶状态显得尤为重要。在车辆编队中,行驶方向上的第一辆车称为领航车,后续车辆称为跟随车,一般领航车负责控制车队的行驶速度、方向等,并且采用有人驾驶或有人监控的无人驾驶;跟随车为无人驾驶,其可以接收领航车的指令修正自身行驶速度、方向等。
车辆编队在公路货运过程中,尤其是高速公路货运场景下,由于道路环境相对简单,车辆的型号、行驶特征等较为一致,因此实现智能车队编组行驶比较容易。虽然车辆编队现在还无法实现完全的无人驾驶,但是采用领航车有人驾驶,跟随车无人驾驶,远程监视 / 操控辅助的方式已经在实际道路货物运输中得到应用。例如,滴滴货运等已经在实际道路运输中进行了小规模实践,效果良好,能够显著降低公路货运的人工成本和燃油消耗。
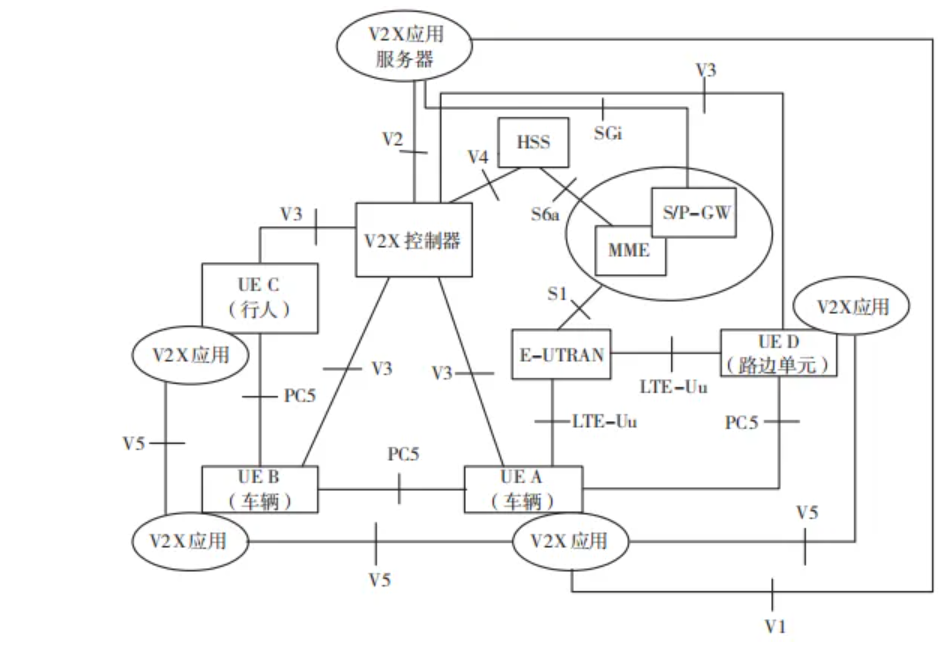
图 1 3GPP V2X 系统架构
图 1 中 UE A 和 UE B 是车辆间通信;UE A和 UE D 是通过车载单元(On Board Unit,OBU)和路侧单元(Road Side Unit,RSU)间 PC5 接口直连通信。采用直连通信能够降低通信时延,实现快速调整交通参与者的行驶状态的目的。以车辆间通信过程为例,V2V 通信过程如图 2 所示。
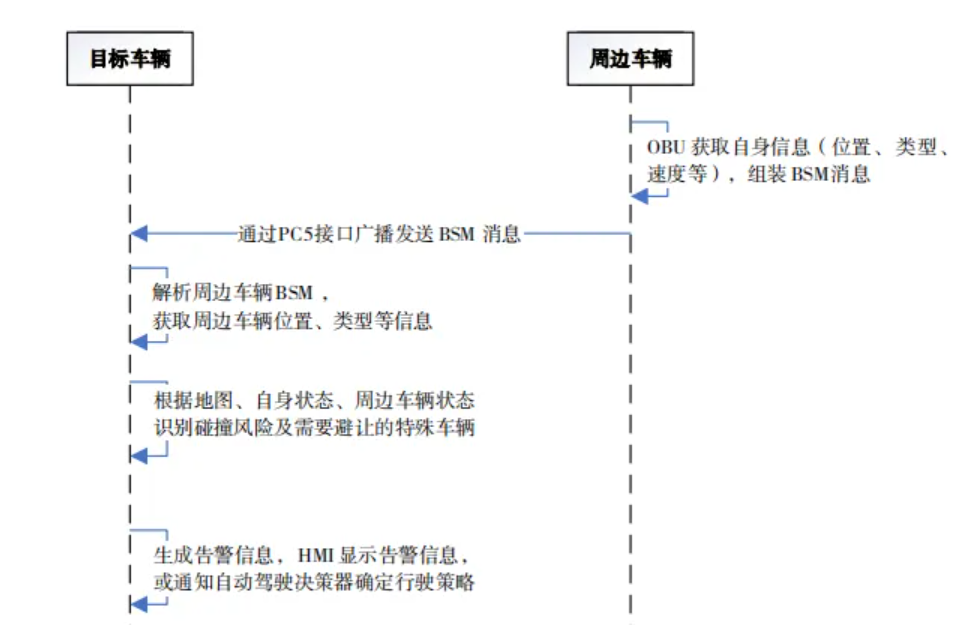
图 2 V2V 通信过程
(1)RSU 广播消息。RSU 作为通信基础设施的一部分,会周期性地广播一些基本的系统信息和服务通告,比如路况、交通信号灯状态等。这些信息通过无线信道发送给附近的车辆。OBU接收 RSU 信息,对这些信息进行解析和处理,识别出与车辆当前位置相关的消息,并结合车载传感器的数据,获取自身行驶状态及路况。
(2)OBU 广播基本安全消息(Basic Safety Message,BSM)。OBU 根据自身行驶状态及行驶意图,组装 BSM 并通过 PC5 广播。
(3)解析其他车辆信息。从 PC5 接口接收其他 OBU 发送的 BSM,获取其他车辆的位置、状态、类型、尺寸等信息。
(4)风险识别。OBU 根据地图、自身状态和其他车辆信息,筛选有碰撞风险的车辆或者需要避让的特殊车辆。
(5)生成告警消息。OBU 根据识别出的风 险 生 成 告 警 消 息, 通 知 人 机 界 面(Human Machine Interface,HMI)或自动驾驶决策器。
(6)决策驾驶策略。HMI 显示告警信息或自动驾驶决策器根据告警消息生成行驶策略,并通过控制相关部件等操作改变行驶方向、速度等,同时将行驶意图封装到 BSM 中并发送。
总的来说,OBU 通过 PC5 接口接收广播消息、发送请求,以及与 RSU 直接通信来获取所需的信息,实现车辆的协同与辅助。这种通信过程可以提供更安全、高效的道路交通管理和交互。


